Honors College Upcoming Events Heading link
Apr
24
2024
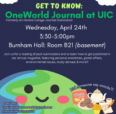
Get To Know OneWorld Journal
Wednesday, 3:30 pm–5:00 pm
Explore Heading link






Honors College Highlights Heading link